Title here
Summary here
To guide you through the SDK’s functionalities, you can follow this written documentation (which is more complete) as well as the provided notebooks, allowing you to learn interactively with your robot.
You can find the example notebooks in reachy2_sdk/src/examples.
The examples are not installed by default. Clone the folder with the following commands in your desired directory. This will add an examples_sdk folder containing all notebooks.
git clone --no-checkout https://github.com/pollen-robotics/reachy2-sdk.git examples_sdk
cd examples_sdk
git sparse-checkout init --cone
git sparse-checkout set src/examples
git checkout develop
mv src/examples/* .
rm -rf src/Navigate to the folder containing the notebooks:
cd path/to/folderOpen your code editor:
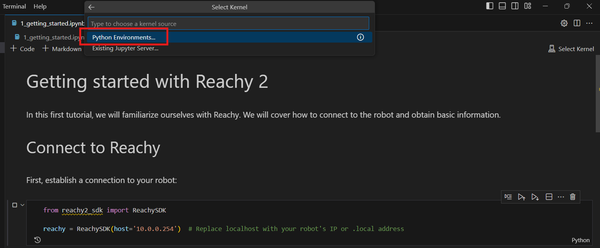
code .Execute the first cell. If prompted, install Jupyter and Python extensions by clicking “Yes.”
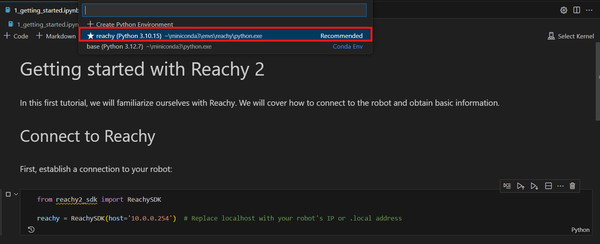
Select the appropriate kernel:
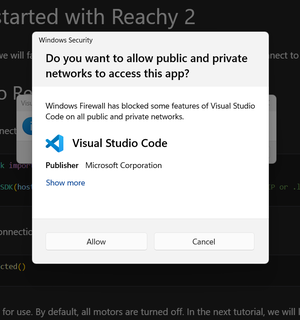
Allow access if prompted by a Windows security popup:
Install the ipykernel package to run the notebooks:
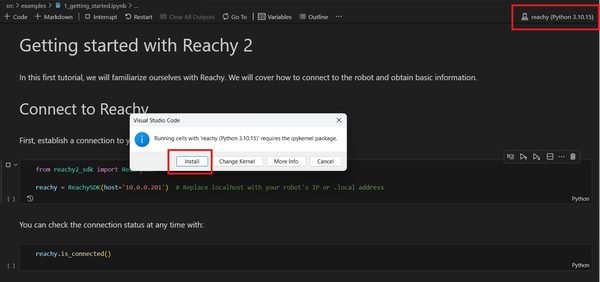
You are now ready to proceed!
Follow the instructions in “Connect to Reachy 2” to find Reachy’s IP address. Connect to the robot with:
(type python first in your terminal)
from reachy2_sdk import ReachySDK
reachy = ReachySDK(host='10.0.0.201') # Replace with the actual IPVerify the connection:
reachy.is_connected()
>>> TrueIf the connection is lost and the issue is resolved, reconnect with:
reachy.connect()When starting, the robot is in compliant mode, allowing manual manipulation of its parts. In this mode, the robot won’t respond to any command you send to it. To activate motor control:
reachy.turn_on()At the end of your session, return to compliant mode:
reachy.turn_off()This will act on all parts of your robot, including the mobile base.
⚠️ Turning off can be a bit brutal, especially if the arms are raised. You can use reachy.turn_off_smoothly() for torques to gradually decrease:
reachy.turn_off_smoothly()All parts are detailed below in ReachySDK attributes.
At any time, you can check the state of your robot using the is_on() or is_off() method. Note that it will return True only if all parts are in the requested state. This means both methods can return False if the right arm is ON but not the left one for example.
If you want to turn on or off a single part, access directly the relevant part and turn it on or off, for example for the left arm:
reachy.l_arm.turn_on()
reachy.l_arm.turn_off()All parts are detailed below in ReachySDK attributes.
At any time, you can check the state of your robot using the is_on() or is_off() method. Note that it will return True only if all parts are in the requested state. This means both methods can return False if the right arm is on but not the left one for example.
# Turn on all parts
reachy.turn_on()
# Check robot state
reachy.is_on()
>>> True
reachy.is_off()
>>> False
# Turn off only the left arm
reachy.l_arm.turn_off()
# Check robot state
reachy.is_on() # reachy is not on, as left arm is off
>>> False
reachy.is_off() # but reachy is not fully off neither
>>> False
# Check parts state
reachy.r_arm.is_on() # right arm is still on
>>> True
reachy.l_arm.is_off() # left arm is off
>>> True2 standard postures are accessible and can be called easily to setup your starting position:
To start at the default posture, use the goto_posture() function:
reachy.goto_posture('default')By default, this movement is made in 2 seconds. You can choose to specify a custom duration. For example, to reach the elbow_90 posture in 5 seconds:
reachy.goto_posture('elbow_90', duration=5)The reachy object instanciated from the ReachySDK class above is the root access to get all incoming information from Reachy 2 (joints or sensors) and to control each part of the robot (left/right arm, head, mobile base).
The reachy object has 10 attributes and numerous methods which you can find in the documentation.
If you want to have an overview, you can browse the basic attributes and methods below.
The reachy detailed attributes give access to info, parts and sensors of the robot.
reachy.audio
reachy.audit
reachy.cameras
reachy.head
reachy.info
reachy.joints
reachy.l_arm
reachy.mobile_base
reachy.r_arm
reachy.tripod
reachy.audit
>>> {'r_arm': {'shoulder': 'Ok', 'elbow': 'Ok', 'wrist': 'Ok', 'gripper': None}, 'l_arm': {'shoulder': 'Ok', 'elbow': 'Ok', 'wrist': 'Ok', 'gripper': None}, 'head': {'neck': 'Ok', 'l_antenna': None, 'r_antenna': None}}Camera object containing both cameras of Reachy (teleop and depth one).
reachy.cameras
>>> <CameraManager intialized_cameras=
<Camera name="depth" stereo=False>
<Camera name="teleop" stereo=True>
>Head object containing the three joints composing the Orbita actuator along with methods for its kinematics or to control it.
reachy.head
>>> <Head on=False actuators=
neck: <Orbita3d on=False joints=
<OrbitaJoint axis_type="roll" present_position=4.76 goal_position=4.76 >
<OrbitaJoint axis_type="pitch" present_position=-14.26 goal_position=-14.26 >
<OrbitaJoint axis_type="yaw" present_position=19.11 goal_position=19.11 >
>
l_antenna: <Antenna on=False joints=
<DynamixelMotor on=False present_position=54.32 goal_position=54.32 >
>
r_antenna: <Antenna on=False joints=
<DynamixelMotor on=False present_position=-52.73 goal_position=-52.73 >
>
>Info object containing Reachy’s informations
reachy.info
>>> <ReachyInfo mode="REAL"
robot_serial_number="reachy2-pvt01"
hardware_version=""
core_software_version="1.7.4.11"
robot_api_version="1.0.18"
battery_voltage=30.0 >Joint object containing every joint of the robot, from its arms to its head. This is useful when you want to get information, like the position, from all joints at once.
reachy.joints
>>> {'r_arm.shoulder.pitch': <OrbitaJoint axis_type="pitch" present_position=2.93 goal_position=2.93 >,
'r_arm.shoulder.roll': <OrbitaJoint axis_type="roll" present_position=16.06 goal_position=16.06 >,
'r_arm.elbow.yaw': <OrbitaJoint axis_type="yaw" present_position=9.9 goal_position=9.9 >,
'r_arm.elbow.pitch': <OrbitaJoint axis_type="pitch" present_position=-9.23 goal_position=-9.23 >,
'r_arm.wrist.roll': <OrbitaJoint axis_type="roll" present_position=-13.98 goal_position=-13.98 >,
'r_arm.wrist.pitch': <OrbitaJoint axis_type="pitch" present_position=-2.85 goal_position=-2.85 >,
'r_arm.wrist.yaw': <OrbitaJoint axis_type="yaw" present_position=-18.11 goal_position=-18.11 >,
'r_arm.gripper': <GripperJoint on=False present_position=129.81 goal_position=129.81 >,
'l_arm.shoulder.pitch': <OrbitaJoint axis_type="pitch" present_position=-0.31 goal_position=-0.31 >,
'l_arm.shoulder.roll': <OrbitaJoint axis_type="roll" present_position=-15.01 goal_position=-15.01 >,
'l_arm.elbow.yaw': <OrbitaJoint axis_type="yaw" present_position=-5.86 goal_position=-5.86 >,
'l_arm.elbow.pitch': <OrbitaJoint axis_type="pitch" present_position=-4.81 goal_position=-4.81 >,
'l_arm.wrist.roll': <OrbitaJoint axis_type="roll" present_position=-3.49 goal_position=-3.49 >,
'l_arm.wrist.pitch': <OrbitaJoint axis_type="pitch" present_position=18.09 goal_position=18.09 >,
'l_arm.wrist.yaw': <OrbitaJoint axis_type="yaw" present_position=9.01 goal_position=9.01 >,
'l_arm.gripper': <GripperJoint on=False present_position=128.5 goal_position=128.5 >,
'head.neck.roll': <OrbitaJoint axis_type="roll" present_position=4.76 goal_position=4.76 >,
'head.neck.pitch': <OrbitaJoint axis_type="pitch" present_position=-14.26 goal_position=-14.26 >,
'head.neck.yaw': <OrbitaJoint axis_type="yaw" present_position=19.11 goal_position=19.11 >,
'head.l_antenna': <DynamixelMotor on=False present_position=54.32 goal_position=54.32 >,
'head.r_antenna': <DynamixelMotor on=False present_position=-52.73 goal_position=-52.73 >}Arm object containing every joint in the left arm along with its kinematics methods.
reachy.l_arm
>>> <Arm on=False actuators=
shoulder: <Orbita2d on=False joints=
<OrbitaJoint axis_type="pitch" present_position=-0.31 goal_position=-0.31 >
<OrbitaJoint axis_type="roll" present_position=-15.01 goal_position=-15.01 >
>
elbow: <Orbita2d on=False joints=
<OrbitaJoint axis_type="yaw" present_position=-5.86 goal_position=-5.86 >
<OrbitaJoint axis_type="pitch" present_position=-4.81 goal_position=-4.81 >
>
wrist: <Orbita3d on=False joints=
<OrbitaJoint axis_type="roll" present_position=-3.49 goal_position=-3.49 >
<OrbitaJoint axis_type="pitch" present_position=18.09 goal_position=18.09 >
<OrbitaJoint axis_type="yaw" present_position=9.01 goal_position=9.01 >
>
gripper: <ParallelGripper on=False joints=
<GripperJoint on=False present_position=128.5 goal_position=128.5 >
>
>Mobile_base object containing the informations about the mobile base.
reachy.mobile_base
>>> <MobileBase on=True
lidar_safety_enabled=True
battery_voltage=26.6>Arm object containing every joint in the right arm along with its kinematics methods.
reachy.r_arm
>>> <Arm on=False actuators=
shoulder: <Orbita2d on=False joints=
<OrbitaJoint axis_type="pitch" present_position=2.93 goal_position=2.93 >
<OrbitaJoint axis_type="roll" present_position=16.06 goal_position=16.06 >
>
elbow: <Orbita2d on=False joints=
<OrbitaJoint axis_type="yaw" present_position=9.9 goal_position=9.9 >
<OrbitaJoint axis_type="pitch" present_position=-9.23 goal_position=-9.23 >
>
wrist: <Orbita3d on=False joints=
<OrbitaJoint axis_type="roll" present_position=-13.98 goal_position=-13.98 >
<OrbitaJoint axis_type="pitch" present_position=-2.85 goal_position=-2.85 >
<OrbitaJoint axis_type="yaw" present_position=-18.11 goal_position=-18.11 >
>
gripper: <ParallelGripper on=False joints=
<GripperJoint on=False present_position=129.81 goal_position=129.81 >
>
>reachy.tripod
>>> <Tripod height=0.996 >The reachy object has several methods, 9 of them being basic methods useful to start using the robot. The other methods are related to robot movements, and will be detailed in a more advanced section.
Method to establish a connection with the robot.
reachy.connect()Method to disconnect from the robot.
reachy.disconnect()Method to check if the robot is connected.
reachy.is_connected()Method to turn on the whole robot. Turning on the robot means putting all the parts of the robot in stiff mode, including the mobile base if there is one. See next section for more information on what the stiff mode is for a motor.
reachy.turn_on()Method to turn off the whole robot. Turning off the robot means putting all parts of the robot in compliant mode, including the mobile base if there is one. See next section for more information on what the compliant mode is for a motor.
reachy.turn_off()Method to turn off the robot in a smooth way : the torques gradually decrease and the robot passes through an intermediate position to avoid brutal colliding with its vertical bars or with obstacles as tables.
reachy.turn_off_smoothly()Method to check if the robot is turned on.
reachy.is_on()Method to check if the robot is turned off.
reachy.is_off()Method to make the robot go to a specific posture (“default” or “elbow_90”)
reachy.goto_posture()🔌 You know how to connect to your robot—great start!
Now you’re ready to dive into the SDK and begin your journey through these tutorials.
Let’s explore what Reachy can do, one step at a time.