Title here
Summary here
Reachy currently does not have any collision avoidance restrictions (e.g., left arm against right arm, arm against torso).
To ensure safe and effective behavior on your Reachy, we recommend testing your movements in a fake mode before implementing them on the physical robot. In this mode, the physical robot will not move, but the simulated version will. This allows you to visualize Reachy’s actions and adapt them as needed before testing on the real robot.
Enable Fake Mode:
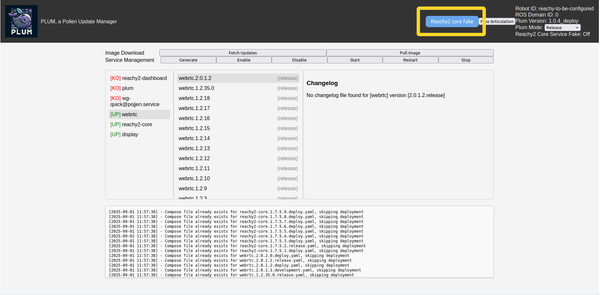
The easiest way to enable fake mode is through graphical tools. This feature is currently available in Plum (a tool users can access but is primarily used internally).
To go to Plum, reach http://your-robot-name.local:5000/ (you need to be on the same network as the robot), then press the button Reachy2 core fake :
You can check that your robot is in Fake mode, by connecting to it and check its info :
reachy = ReachySDK('10.0.0.201') # Replace with your robot IP address
reachy.info
<ReachyInfo mode="FAKE"
....💡 Enabling fake mode via the Dashboard will be soon available !
ros2 launch reachy_bringup reachy.launch.py start_sdk_server:=true start_rviz:=true fake:=trueLaunch Visualization Tools:
Access the dashboard and click on Visualization Tools. This will open RViz, where you can see a fake Reachy in action.
Now that you have tested your movements in fake mode, you are ready to make your robot move! Proceed to the Basics section to start implementing behaviors on your physical Reachy.