Title here
Summary here
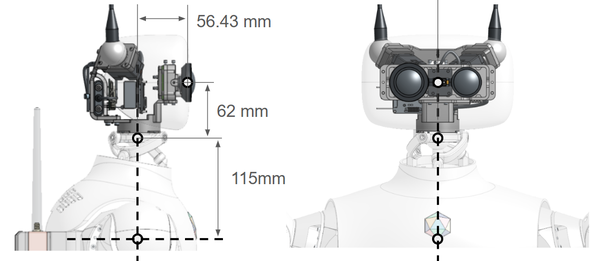
Our vision module combines several features in a single module in Reachy’s head:
Different applications will use different cameras:
Head camera (localisation based on robot’s origin)
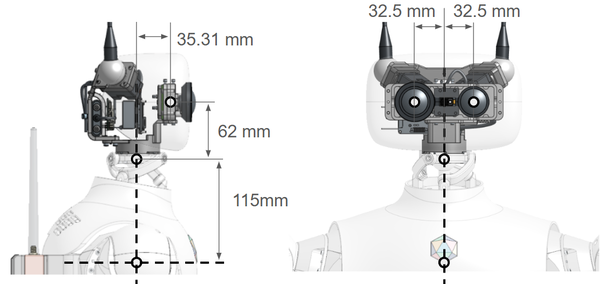
Head TOF (localisation based on robot’s origin)

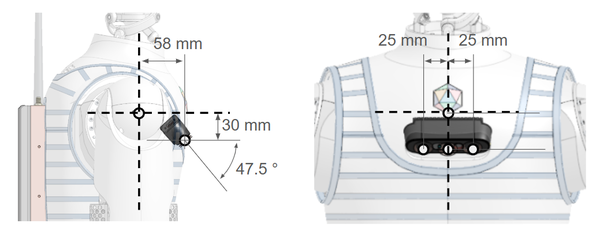
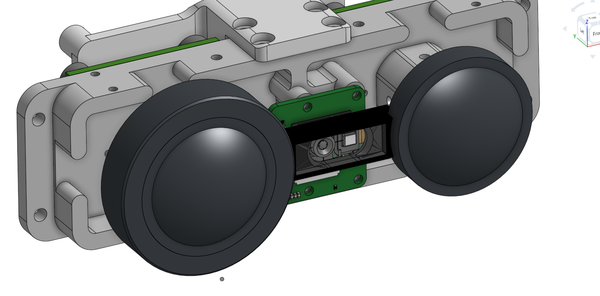
Reachy has a RGB-D camera in its torso to improve its manipulation capabilities. This camera, as opposed to the ones in the head, is fixed.
Depth camera - RGB-D camera fitted into the torso:
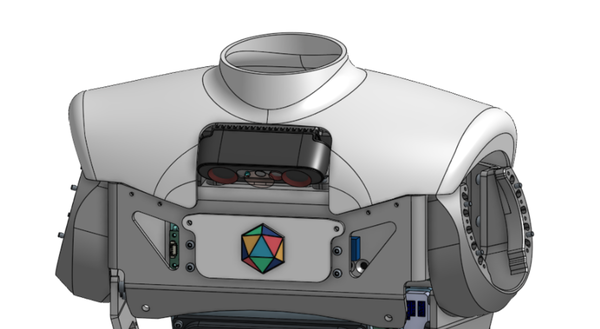
Torso camera (localisation based on robot’s origin)