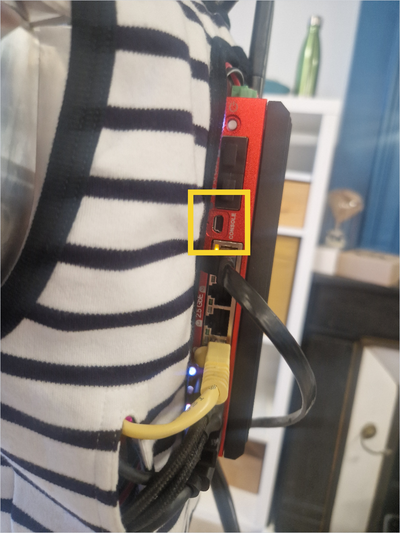
Use the appropriate cable and connect your computer directly to Reachy 2’s computer. The cable has to be plugged in the console port of Reachy 2’s hardware interface.
We use tiofor the serial connection. If you haven’t installed it yet on your computer:
apt install tio
👉
Make sure dialout is in your groups, otherwise add it to your groups. To check it: »> groups If it doesn’t appear in the list, add it with: »> sudo usermod -aG dialout $USER Then reboot your computer for the new group to be effective.
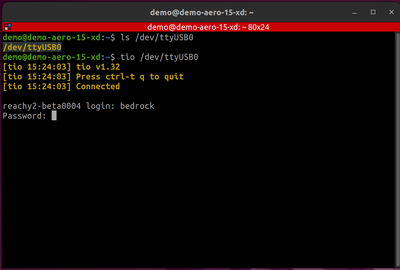
Then, in a terminal on your computer, get access to the robot with:
tio/dev/ttyUSB0
and press Enter.
Note that the connection could be on another USB port. Check all ports with ls /dev/ttyUSB*
Using the robot’s name or its IP address (check this section if you don’t know how to find it), you can directly connect via ssh to Reachy 2’s computer:
ssh bedrock@<Reachy.2.IP.address>
# the same as : ssh bedrock@<Reachy.2.name>.local
For example, with robot’s IP being 192.168.1.42 and name being r2-0000:
ssh bedrock@192.168.1.42
# the same as : ssh bedrock@r2-0000.local
Use the appropriate cable and connect your computer directly to Reachy 2’s computer. The cable has to be plugged in the console port of Reachy 2’s hardware interface.
We use tiofor the serial connection. If you haven’t installed it yet on your computer:
apt install tio
👉
Make sure dialout is in your groups, otherwise add it to your groups. To check it: »> groups If it doesn’t appear in the list, add it with: »> sudo usermod -aG dialout $USER Then reboot your computer for the new group to be effective.
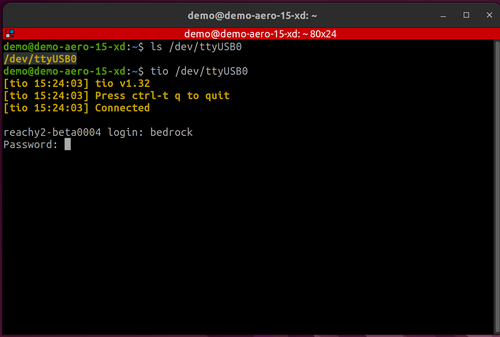
Once connected, open a terminal on your computer and run:
tio/dev/ttyUSB0
Note that depending on the elements you connected to the robot, the port could be something else than ttyUSB0. Check other available serial ports with ls /dev/ttyUSB*
👉
Login: bedrock Password: root
You are then connected to Reachy 2 computer!
I can't connect to the wifi via the DashboardYou try to connect to your Wifi, but the connection seems to fail each time ?
You can log in directly through your terminal, using ssh :
ssh bedrock@<robot.ip.address>
# or use your robot name, written on the back of its neck :ssh bedrock@<robot.name>.local
If you want to change the volume, especially for the starting sound of your robot or the output sound when you teleoperate, you can go directly in the Dashboard, in the Media section and adjust the input and output rates.
If that doesn’t work, you can go on a terminal when the webRTC service is running:
The launch sound is loopingIf you hear the robot launch sound looping, it means that the core cannot run due to an error. You can check :
the reachy2-core service logs in the dashboard, under Services.
that no red LEDs have appeared on any of the joint motors.
that the emergency stop button is not pressed.
You can press the emergency stop button and return all joints to a neutral position, such as:
Then unpress it and let it calibrate again.
If it’s still not working, try to shut down your robot (meaning the emergency button + the bedrock button + the mobile base button) and switch it back on again.
👉
If your problem persists or is not listed in the FAQ, please contact the support forum.