Check which motors are connected
Reachy’s SDK Server might not work due to a motor that have been disconnected during transportation or manipulation. Knowing which motors are actually detected by Reachy’s software is really useful for debug.
Running the discovery
You can run the discovery python script to detect the connected motors.
Make sure that the motors are turned on using the power switch in Reachy’s back.
In a terminal, use the command:
reachy-discovery
This python script will look at each robot’s part (e.g head / left arm / right arm for a Reachy full kit or head / right arm for a Reachy starter kit right) and tell which motors it sees. This is useful to check whether there are missing motors, most likely due to a disconnected cable.
Analysing the discovery’s output
reachy-discovery will output each motor that has not been detected. There are four types of device that could be missing:
Motors
You might be told that one or multiple motors seem to be missing. Usually it is due to a disconnected cable (it might happen during transportation or manipulation). You can refer to the schematic below to identify where are located the missing motors.
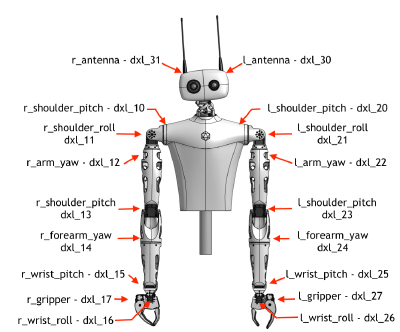
Check the page on How to reconnect a motor if you have any missing motors. For an arm, you should focus on the first motor in the chain missing (the one with the lowest id). Because each motor is connected to the next one sequentially, if one motor is missing, the following in the chain will be as well. For example, if you’re being told that the motors l_wrist_pitch (id 25), l_wrist_roll (id 26) and l_gripper (id 27) are missing, it is probably there is a disconnected cable between l_wrist_pitch and the motor before it in the arm’s chain i.e. l_forearm_yaw.
Force sensor
There is one force sensor in each Reachy’s arm, located between the gripper and wrist_roll motors. The id ‘40’ is for the left arm’s load sensor and the id ‘50’ is for the one in the right arm.
If you don’t see in the discovery a load sensor for an arm, it means that the electronic card used to interact with the force sensor and which is placed around the arm’s effector is not detected.
The location of this board is shown below.

Fans board
For each arm, there is a board used to control Reachy’s fans called r_fan for the right arm and l_fan for the left arm. If either of them is missing, it means that there might be a connection issue with the card.

Orbita
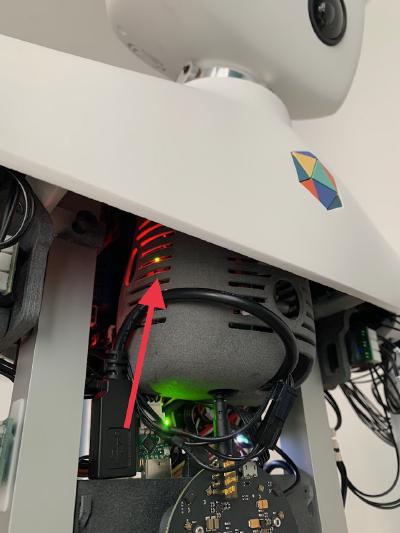
The last element that you should see if you have a Reachy with an head is the Orbita joint of the neck. If you don’t see it, check that the actuator is actually powered, there should be a red led on as shown below.
Redoing a discovery
Doing a new discovery after each cable manipulation for devices will allow you to check if the problem is solved.
💡 Don’t forget to turn off and then back on Reachy’s motors using the switch in its back before redoing a discovery!
Restarting the service
Once you have all the motors and load sensors you need in the discovery, you can restart Reachy’s software.
systemctl restart --user reachy_sdk_server.service