Title here
Summary here
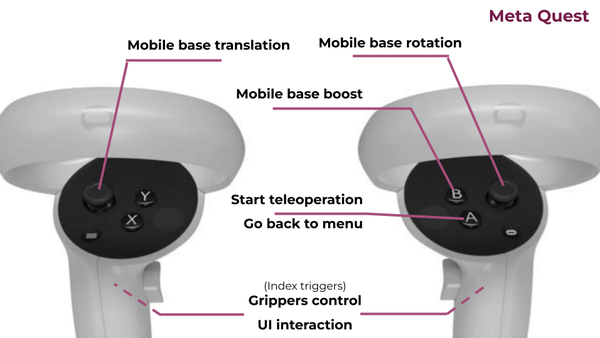
A reminder of the controller inputs mapping is available in the help section of the transition room in the VR teleoperation application:
| Input | Feature description |
|---|---|
| A | At robot teleoperation start: Start robot teleoperation |
| During teleoperation: Return to menu | |
| B | During teleoperation: Mobile base boost |
| X | During teleoperation: Emotions panel When leaving teleoperation (A pressed): Lock robot position |
| Left Thumbstick | During teleoperation: Control mobile base translation |
| Right Thumbstick | During teleoperation: Control mobile base rotation |
| Left Index Trigger | In menu: Select button |
| During teleoperation: Control left gripper | |
| Right Index Trigger | In menu: Select button |
| During teleoperation: Control right gripper | |
| Left Controller position / orientation | During teleoperation: Reachy’s left arm end effector position / orientation |
| Right Controller position / orientation | During teleoperation: Reachy’s right arm end effector position / orientation |
| Headset orientation | During teleoperation: Reachy’s head orientation |
| Input | Feature description |
|---|---|
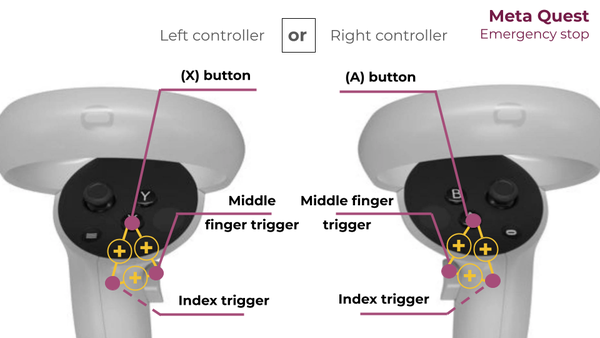
| A + right index trigger + right middle finger trigger | During teleoperation: Emergency stop |
| X + left index trigger + left middle finger trigger | During teleoperation: Emergency stop |
