Commands
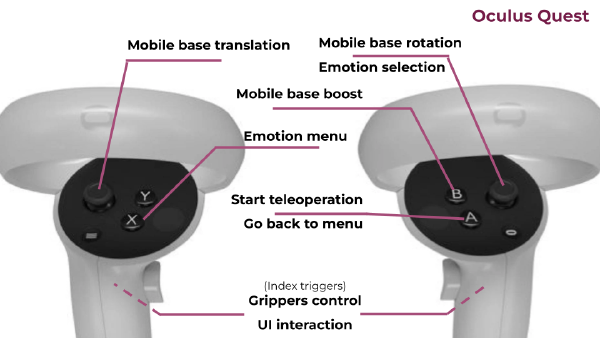
Oculus Quest
| Name | Feature description |
|---|---|
| A | At robot teleoperation start: Start robot teleoperation |
| During teleoperation: Return to menu | |
| B | During teleoperation: Mobile base boost |
| X | During teleoperation: Open emotion menu (keep pressed) / Activate selected emotion (release) |
| When leaving teleoperation (A pressed): Lock robot position | |
| Left Thumbstick | During teleoperation: Control mobile base translation |
| Right Thumbstick | During teleoperation: Control mobile base rotation |
| If emotion menu is open: Select emotion | |
| Left Index Trigger | In menu: Select button |
| During teleoperation: Control left gripper | |
| Right Index Trigger | In menu: Select button |
| During teleoperation: Control right gripper | |
| Left Controller position / orientation | During teleoperation: Reachy’s left arm end effector position / orientation |
| Right Controller position / orientation | During teleoperation: Reachy’s right arm end effector position / orientation |
| Headset orientation | During teleoperation: Reachy’s head orientation |
Valve Index

| Name | Feature description |
|---|---|
| A right | At robot teleoperation start: Start robot teleoperation |
| During teleoperation: Return to menu | |
| A left | During teleoperation: Open emotion menu (keep pressed) / Activate selected emotion (release) |
| When leaving teleoperation (right A pressed): Lock robot position | |
| B right | During teleoperation: Mobile base boost |
| Left Thumbstick | During teleoperation: Control mobile base translation |
| Right Thumbstick | During teleoperation: Control mobile base rotation |
| If emotion menu is open: Select emotion | |
| Left Index Trigger | In menu: Select button |
| During teleoperation: Control left gripper | |
| Right Index Trigger | In menu: Select button |
| During teleoperation: Control right gripper | |
| Left Controller position / orientation | During teleoperation: Reachy’s left arm end effector position / orientation |
| Right Controller position / orientation | During teleoperation: Reachy’s right arm end effector position / orientation |
| Headset orientation | During teleoperation: Reachy’s head orientation |
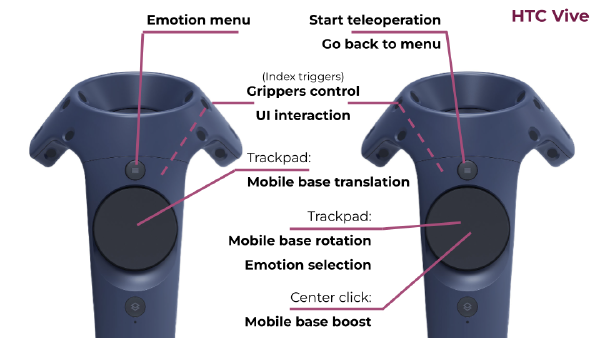
HTC Vive
| Name | Feature description |
|---|---|
| Sandwich menu right | At robot teleoperation start: Start robot teleoperation |
| During teleoperation: Return to menu | |
| Sandwich menu left | During teleoperation: Open emotion menu (keep pressed) / Activate selected emotion (release) |
| When leaving teleoperation (right menu pressed): Lock robot position | |
| Left Trackpad | During teleoperation: Control mobile base translation |
| Right Trackpad | During teleoperation: Control mobile base rotation |
| Center click: Mobile base boost | |
| If emotion menu is open: Select emotion | |
| Left Index Trigger | In menu: Select button |
| During teleoperation: Control left gripper | |
| Right Index Trigger | In menu: Select button |
| During teleoperation: Control right gripper | |
| Left Controller position / orientation | During teleoperation: Reachy’s left arm end effector position / orientation |
| Right Controller right position / orientation | During teleoperation: Reachy’s right arm end effector position / orientation |
| Headset orientation | During teleoperation: Reachy’s head orientation |